Table des matières
Le Pique Assiette
Projet en cours depuis janvier 2024
Objectif
Pouvoir manger seul, sans usage fonctionnel des membres supérieurs
Equipe projet
avec Bernard (porteur projet) + Pierre, Béatrice, Patrick, Alex
Recherche de l’existant :
Système mécanique

Neater Eater : 2800 euros
https://www.ergo-diffusion.com/nos-solutions/handicap/aide-aux-repas/neater-eater-manuel-aide-manger-nem (avec vidéo)
Système électrique/électronique

Neater Eater : 7560 euros
https://www.ergo-diffusion.com/nos-solutions/handicap/aide-aux-repas/neater-eater-electrique-aide-manger-nev6
Prototypes de Bernard, qu'il a déjà fabriqué auparavant (et plus ou moins fonctionnel)
Pique assiette :
- En bois : date 1975 ! fait maison, V2, mécanique (système de manipulation à un bras)
- le système de croix, 3 axes, cuillère/fourchette avec angle de 90°
- Bernard l’a utilisé pendant 3 ans
Pique assiette bourgeois (électrique) : 2005
- fait par son kiné (Mr Bourgeois)
- système de 3 visseuses qui se déplacent sur des tiges filetées, 3 axes, manque les 3 interrupteurs, manque le transfo
- pas réellement utilisé, ne fonctionnait pas bien, système de jeu avec les axes longs
Machine à manger « Maddak inc » depuis 1985
- électrique + mécanique (pas d’électronique)
- système d’interrupteur/contacteur à air
- système de transmission par chaine pour monter/descendre la cuillère, système circulaire (fonctionne seulement dans un sens)
- système de plateau pour faire tourner l’assiette, dans un sens
Cahier des charges :
Pouvoir l’utiliser sans utiliser ses bras du tout (avec très peu de capacités motrices, peu de force musculaire). Bernard se déplace actuellement en fauteuil roulant électrique avec commande aux pieds, qu'il a déjà beaucoup adapté pour être autonome. Le but est de partir de ses besoins et que cette machine à manger puisse être répliquée et servir à d'autres. Autre objectif visé du cahier des charges : accessibilité financière ET réparabilité en fablab.
Spécificités techniques :
On va commencer par prototyper un bras motorisé controlable par carte arduino, sur le modèle du pique assiette
3 bras orientés par 3 servomoteurs (un servomoteur est un moteur doté de la capacité à maintenir une position angulaire précise, si on force dessus et qu'il bouge il le détecte et revient à sa position)
fixé sur une base avec la carte controleur
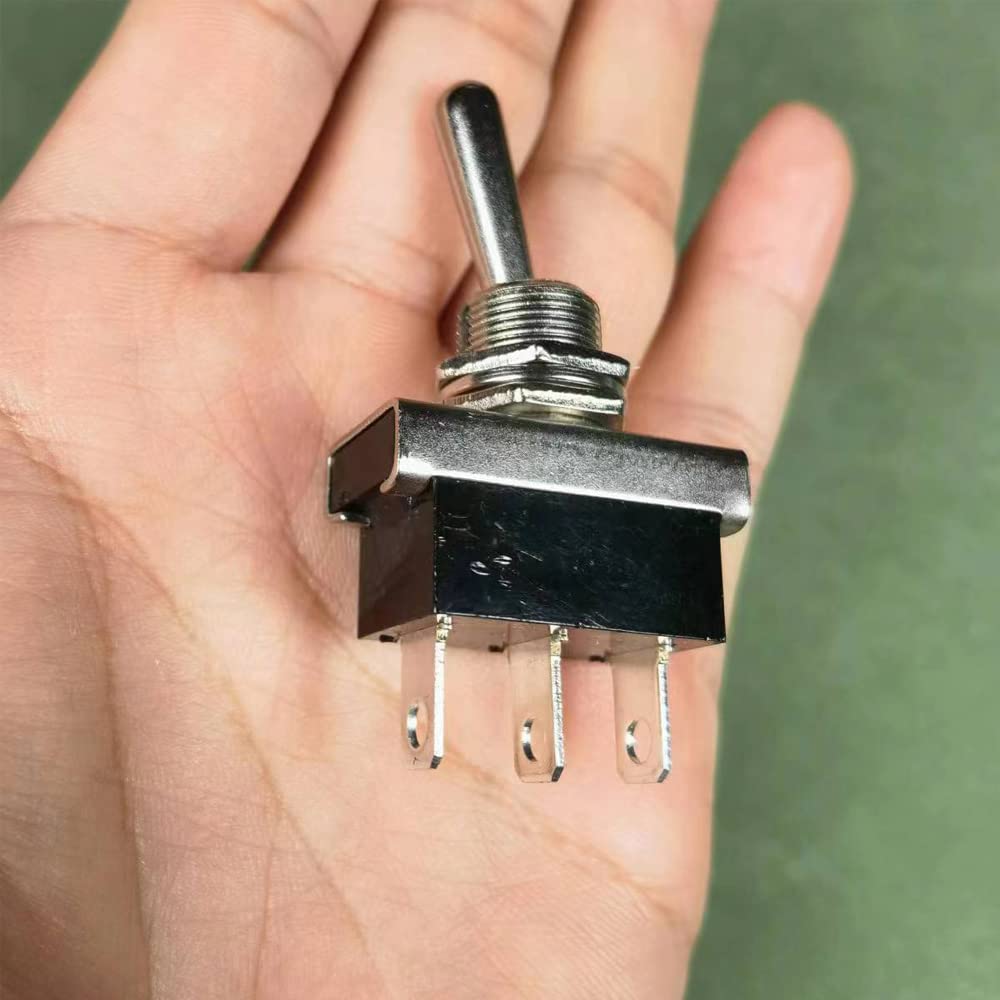
On peut commander indépendamment chaque moteur via 3 interrupteurs à 3 positions (rotation dans un sens, arrêt, rotation dans l'autre sens)
On pourra aussi par la suite programmer certains mouvements via la carte arduino
Les bras font une vingtaine de centimètres et seront générés pas impression 3D
Besoins matériaux
3 servomoteurs : servomoteur dynamixel AX-12A : 60 euros/pièce Bois pour la boite 1 bobine fil imprimante 3D 3 contacteurs
Tableur pour identifier les références de moteurs en fonction des contraintes : https://murena.io/s/wHLXWPKjjWgJ9D3
Etapes de prototypage
Le bras articulé se compose de 3 servo moteurs reliés entre eux et de 3 différentes parties, réalisées en impression 3D. Le but est que chaque moteur se déplace dans le même plan.
L'assiette est placée sur un porte assiette qui peut tourner, réaliser en impression 3D également.
Un plateau de commande avec des interrupteurs est utilisé aux pieds et permet de commander le bras articulé et le plateau tournant de l'assiette. Chaque interrupteur pourra être paramétré : l'idée actuelle est que l'un des interrupteurs commande le mouvement horizontal du bras, qu'un autre interrupteur commande le mouvement vertical et que le dernier commande l'angle du dernier moteur (donc de la fourchette et de la cuillère). Les interrupteurs sont des modèles 3 positions avec retour automatique. Un essai de pédale est envisagé dans le futur, pour faciliter le contrôle du bras robot (mais n'est pas la priorité actuellement car ces interrupteurs sont fonctionnels pour Bernard).

Le premier axe en impression 3D (noir sur la photo) a évolué : il a été renforcé, une gouttière a été intégrée pour passer les câbles, les renforts ont été élargis pour pouvoir passer le moteur au milieu, un axe a été déporté pour compenser le mouvement de tremblements et la force exercée sur le reste du bras, grâce à des ressorts.
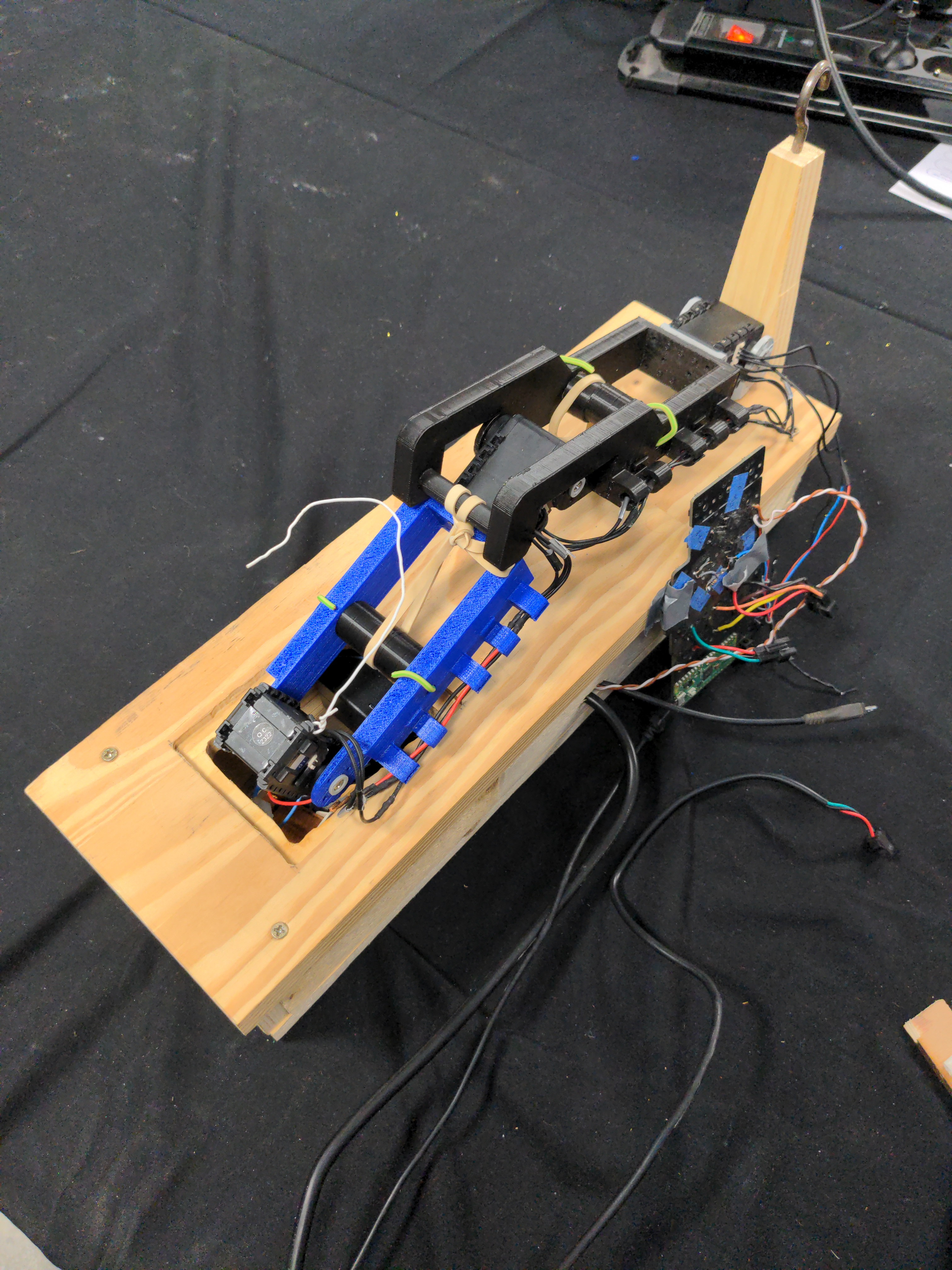

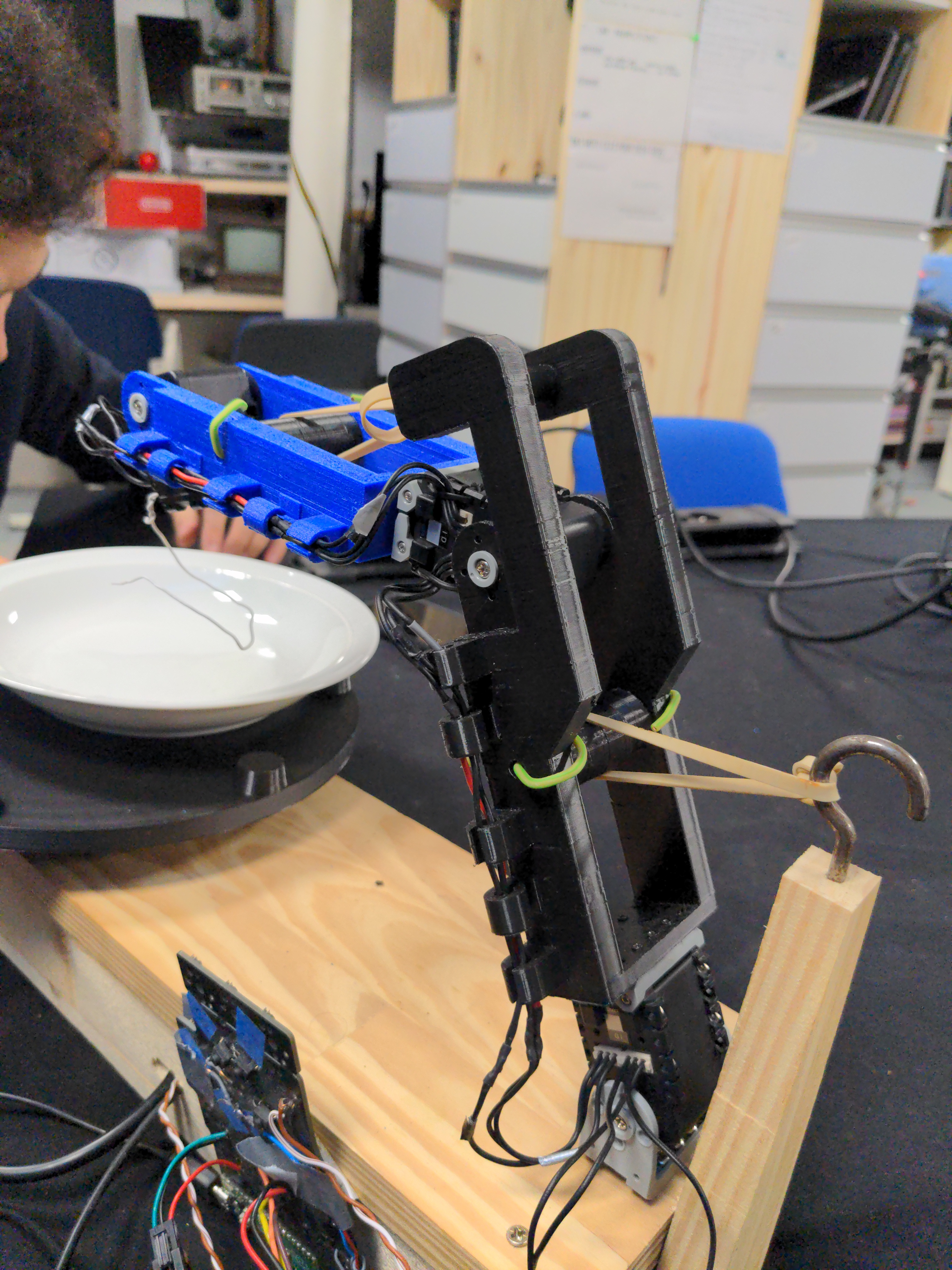
Le deuxième axe en impression 3D (bleu sur la photo) a lui aussi été modifié pour accueillir une gouttière pour les câbles qui relient les deux moteurs entre eux.
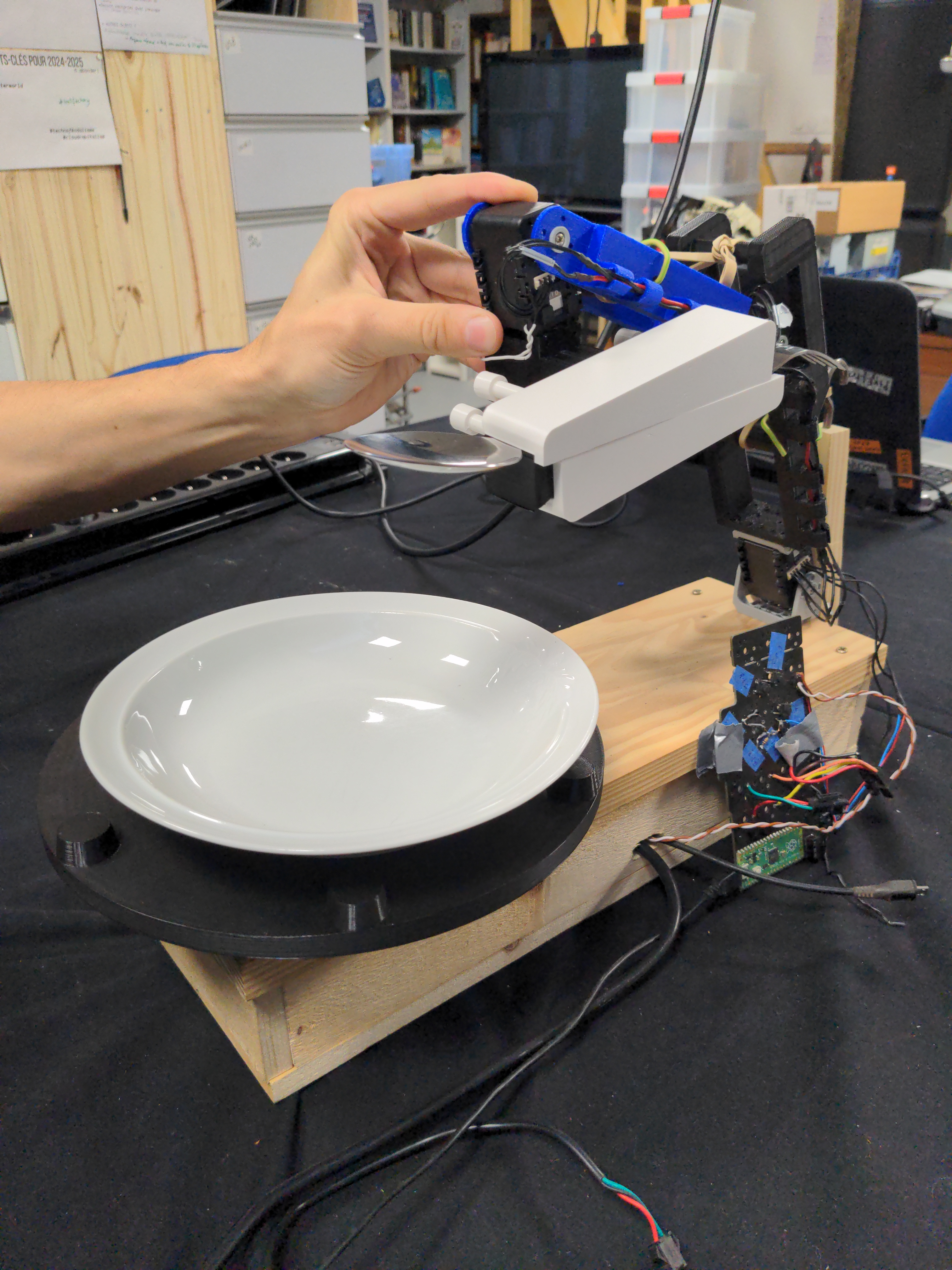
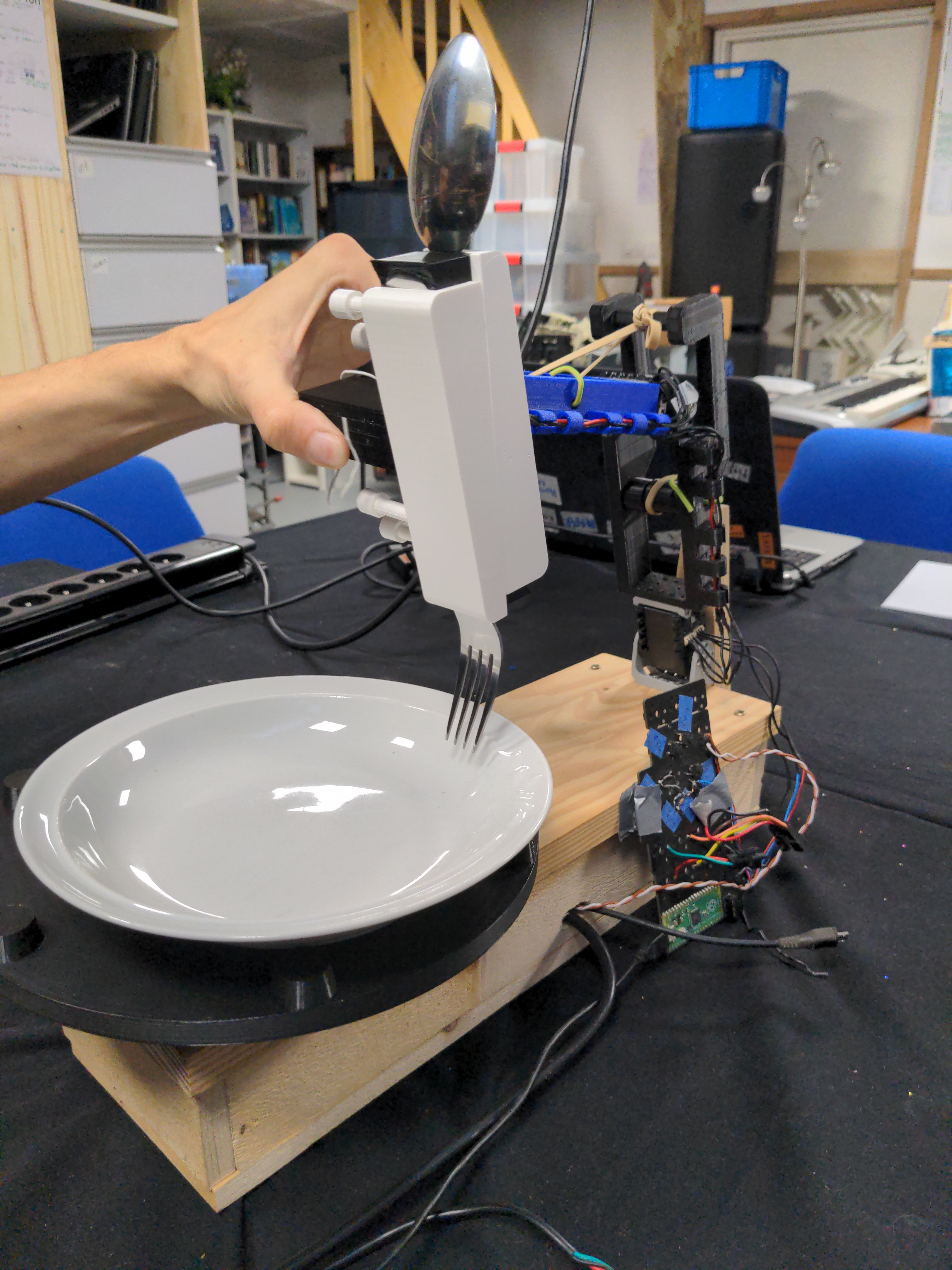
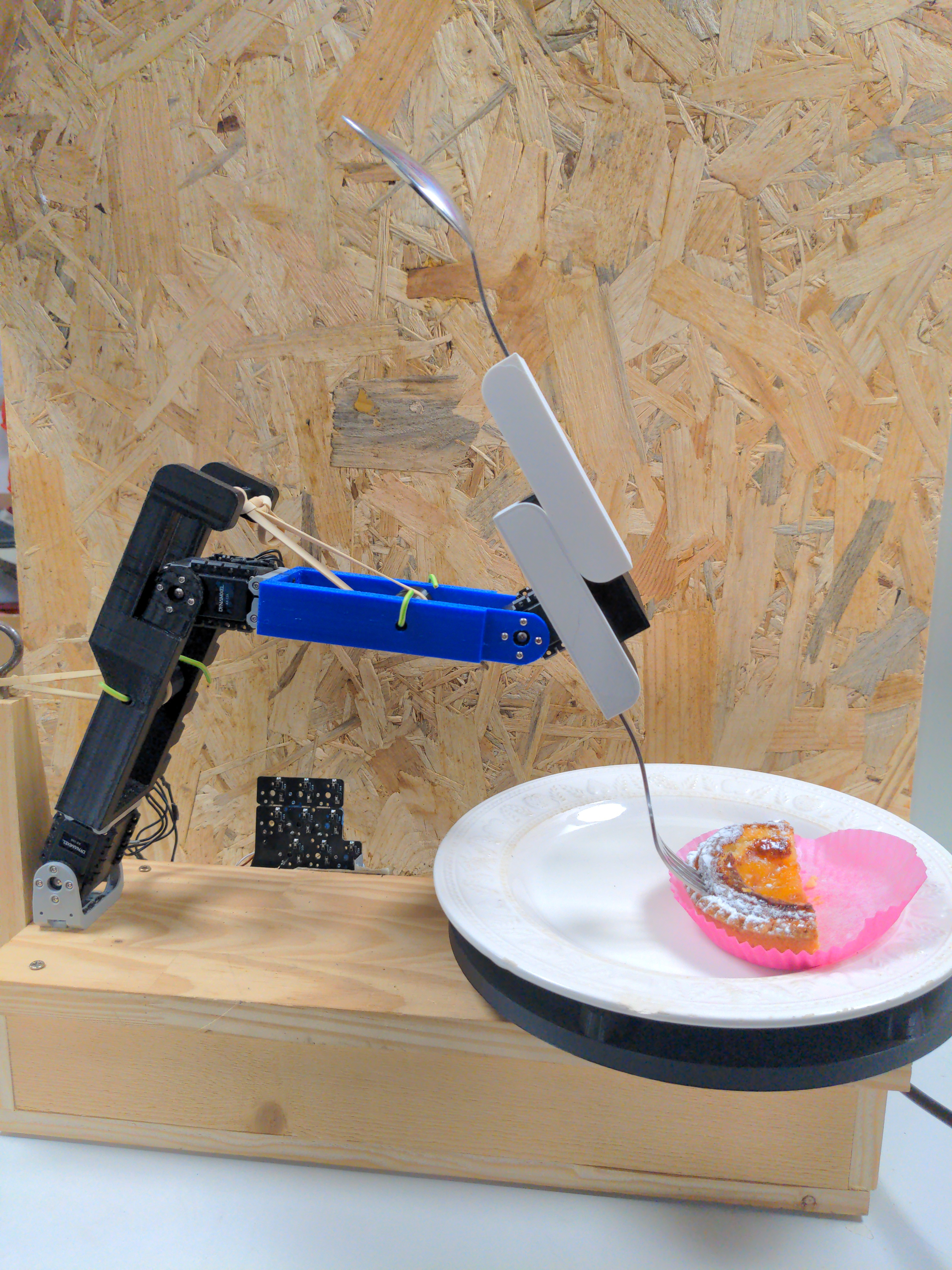
La dernière partie réalisée (en noir et blanc sur la photo) permet de maintenir une cuillère et une fourchette. Cette partie est amovible pour pouvoir laver les couverts.

Le pique assiette est pour l'instant en cours de recherche et développement au 24/10/24. Le code est toujours en phase d'amélioration et d'affinage pour un meilleur contrôle des mouvements de chaque segment.