Table des matières
Lightbox
(Page créée le 8 avril 2022)
Premier prototype pour une boite d'éclairage pour photographier des photomontages
Structure en tube PVC IRO, styroglass translucide, raspberry pi avec camera
Structure
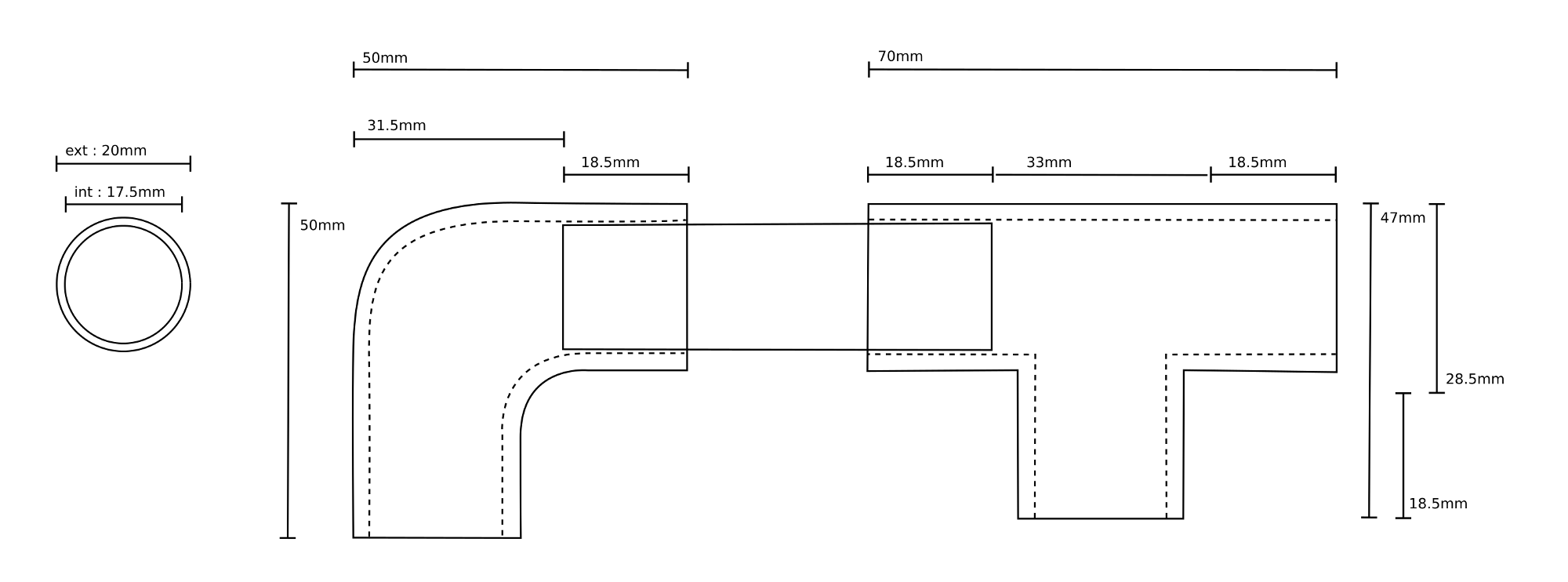
Le tube IRL (Isolant Rigide Lisse) ou tube IRO (Isolant Rigide Ordinaire) est utilisé dans le bâtiment comme gaine pour les câbles électriques. Il est en PVC, en général gris ou blanc et à l'avantage de fournir un matériau très économique pour construire des structures. On peut assembler les tubes avec différents types de raccords : manchons de raccordement, pièces en T, en L, coudes ou courbes. On trouve aussi des fixations de différents types pour les fixer dans un mur. Dimensions communes : 2,40 m de longueur pour un diamètre de 16mm, 20mm, 25mm, 32mm ou 40mm.

Dimensions utiles
Quelques nombres bien utiles pour réaliser des structures avec des tubes IRO.
Projet
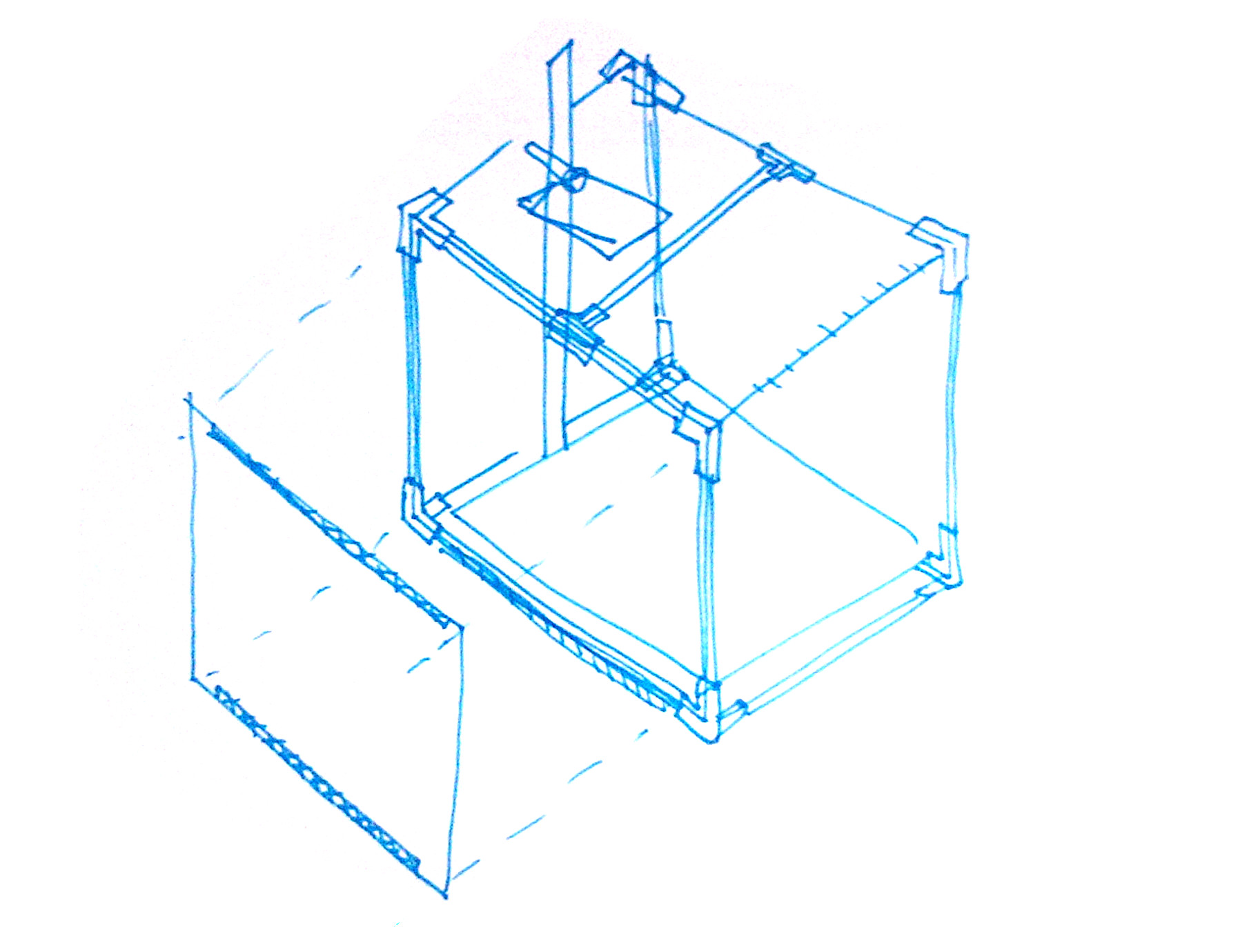
Premier croquis, une structure en tube IRO porte deux morceaux de styroglass translucide qui diffuseront la lumière projetée de l'extérieur. La structure en tubes IRO est assemblée à partir de pièces de raccord imprimées en 3D.
Les pièces de ce projet sont compatibles avec les coudes et pièces en té existantes. Mais elles sont pleines, donc on ne peut plus s'en servir comme gaine! Finalement non, les pièces ne sont pas compatibles mais s'articulent autour d'un cube de 20mm.
Raccords IRO
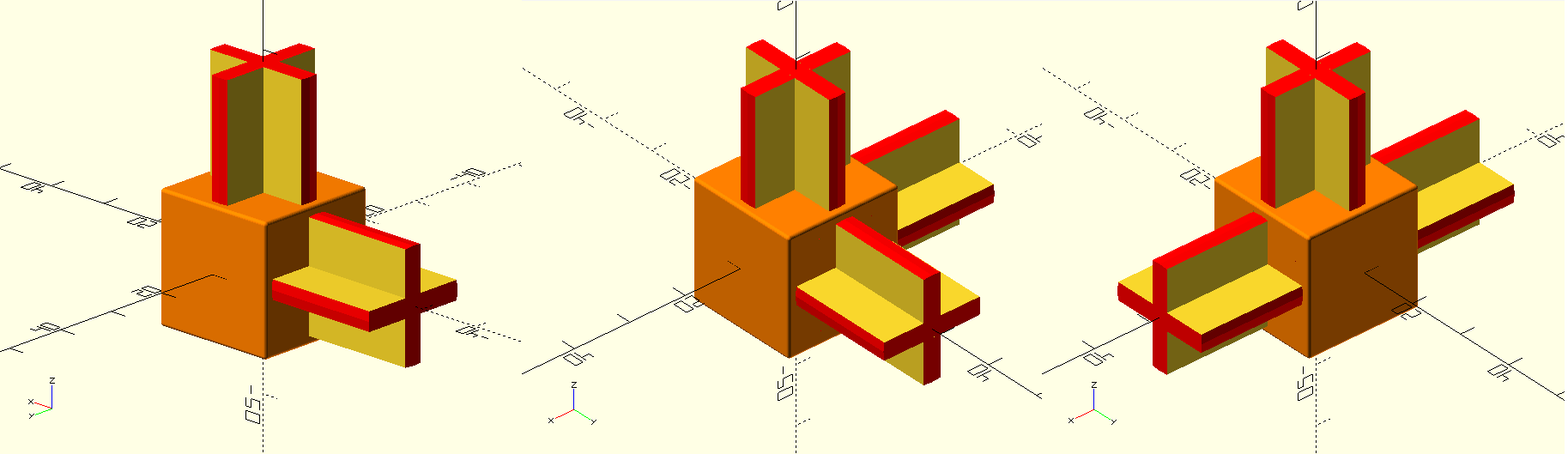
Les 3 pièces nécessitent le module roundedcube de Daniel Upshaw.
iro_raccord_l.scad (cliquer pour afficher le code)
- iro_raccord_l.scad
/* Raccords pour tube IRO Debian 9.5 Stretch @ kirin / 20220410 / pierre @ lesporteslogiques.net OpenSCAD 2021.1 + roundedcube.scad (par Daniel Upshaw) : https://danielupshaw.com/openscad-rounded-corners/ */ use <roundedcube.scad>; color([1, 0.5, 0]) roundedcube(size = [20, 20, 20], center = true, radius = 0.5, apply_to = "all"); translate([0, 0, 18.5]) croix(); rotate([0, 90, 0]) translate([0, 0, -18.5]) croix(); module socle_cylindre() { color([0, 1, 0]) cylinder($fn=72, h=2.5, r=11.25, center=true); } module croix() { // hauteur totale 19.5, dont 1 à inclure dans lautre partie intersection() { color([1, 0, 0]) cylinder($fn=36, h=18.5+1, r=8.75, center=true); union() { cube(size=[17.5+0.3, 3, 18.5+1.3], center=true); rotate([0, 0, 90]) cube(size=[17.5+0.3, 3, 18.5+1.3], center=true); } } }
iro_raccord_l3d.scad (cliquer pour afficher le code)
- iro_raccord_l3d.scad
/* Raccords pour tube IRO Debian 9.5 Stretch @ kirin / 20220410 / pierre @ lesporteslogiques.net OpenSCAD 2021.1 + roundedcube.scad (par Daniel Upshaw) : https://danielupshaw.com/openscad-rounded-corners/ */ use <roundedcube.scad>; color([1, 0.5, 0]) roundedcube(size = [20, 20, 20], center = true, radius = 0.5, apply_to = "all"); translate([0, 0, 18.5]) croix(); rotate([0, 90, 0]) translate([0, 0, -18.5]) croix(); rotate([90, 270, 0]) translate([0, 0, -18.5]) croix(); module socle_cylindre() { color([0, 1, 0]) cylinder($fn=72, h=2.5, r=11.25, center=true); } module croix() { // hauteur totale 19.5, dont 1 à inclure dans lautre partie intersection() { color([1, 0, 0]) cylinder($fn=36, h=18.5+1, r=8.75, center=true); union() { cube(size=[17.5+0.3, 3, 18.5+1.3], center=true); rotate([0, 0, 90]) cube(size=[17.5+0.3, 3, 18.5+1.3], center=true); } } }
iro_raccord_t.scad (cliquer pour afficher le code)
- iro_raccord_t.scad
/* Raccords pour tube IRO Debian 9.5 Stretch @ kirin / 20220410 / pierre @ lesporteslogiques.net OpenSCAD 2021.1 + roundedcube.scad (par Daniel Upshaw) : https://danielupshaw.com/openscad-rounded-corners/ */ use <roundedcube.scad>; color([1, 0.5, 0]) roundedcube(size = [20, 20, 20], center = true, radius = 0.5, apply_to = "all"); translate([0, 0, 18.5]) croix(); rotate([0, 90, 0]) translate([0, 0, -18.5]) croix(); rotate([0, 270, 0]) translate([0, 0, -18.5]) croix(); module socle_cylindre() { color([0, 1, 0]) cylinder($fn=72, h=2.5, r=11.25, center=true); } module croix() { // hauteur totale 19.5, dont 1 à inclure dans lautre partie intersection() { color([1, 0, 0]) cylinder($fn=36, h=18.5+1, r=8.75, center=true); union() { cube(size=[17.5+0.3, 3, 18.5+1.3], center=true); rotate([0, 0, 90]) cube(size=[17.5+0.3, 3, 18.5+1.3], center=true); } } }
Commentaires : pour une fixation en force afin d'avoir une structure rigide, peuvent difficilement être démontées.
Pièce de soutien pour la camera
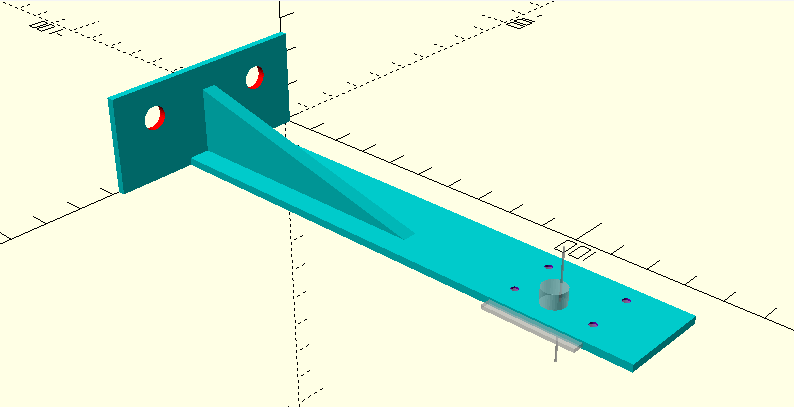
plateforme_picam_2.scad (cliquer pour afficher le code)
- plateforme_picam_2.scad
/* Support Picam Debian 9.5 Stretch @ kirin / 20220411 / pierre @ lesporteslogiques.net OpenSCAD 2021.1 */ difference() { color([0, 0.8, 0.8]) cube(size=[58, 2, 26], center=false); color([1, 0, 0]) percement_fixation(); } difference() { color([0, 0.8, 0.8]) translate([12, 0, 0])cube(size=[24, 140, 2], center=false); // plateforme translate([27, 115, 1]) rotate([0, 0, 90]) percement_picam(); // percement_picam } color([0, 0.8, 0.8]) translate([30, 0, 0]) rotate([270, 0, 90]) renfort(4); //color([0, 0.8, 0.8]) translate([58, 0, 0]) rotate([270, 0, 90]) renfort(); module renfort(ep = 2) { linear_extrude(ep) { polygon( points=[ [0,0], [0,-20] ,[80,0] ], paths =[ [0,1,2] ] ); }; } module percement_fixation() { translate([12, 2, 17]) rotate([0, 90, 90]) cylinder($fn=36, h=6, r=3.2, center=true); translate([46, 2, 17]) rotate([0, 90, 90]) cylinder($fn=36, h=6, r=3.2, center=true); } module percement_picam(startx = 0, starty = 0, startz = 0) { { % translate([startx, starty, startz]) %cube([25, 24, 1], center = true); // forme pcb picam % translate([startx, starty, startz-15]) cylinder($fn = 3, h = 30, r=0.3); // axe % translate([startx, starty -2.5, 4]) cylinder($fn=36, h=4, r=3.2, center=true); // objectif picam } color([0.5, 0, 0.8]) translate([startx - 10.5, starty -2.5, startz]) cylinder($fn=36, h=4, r=1, center=true); color([0.5, 0, 0.8]) translate([startx + 10.5, starty -2.5, startz]) cylinder($fn=36, h=4, r=1, center=true); color([0.5, 0, 0.8]) translate([startx - 10.5, starty +10, startz]) cylinder($fn=36, h=4, r=1, center=true); color([0.5, 0, 0.8]) translate([startx + 10.5, starty +10, startz]) cylinder($fn=36, h=4, r=1, center=true); }
→ trop souple, nécessite plsu de renforts pour rester rigide
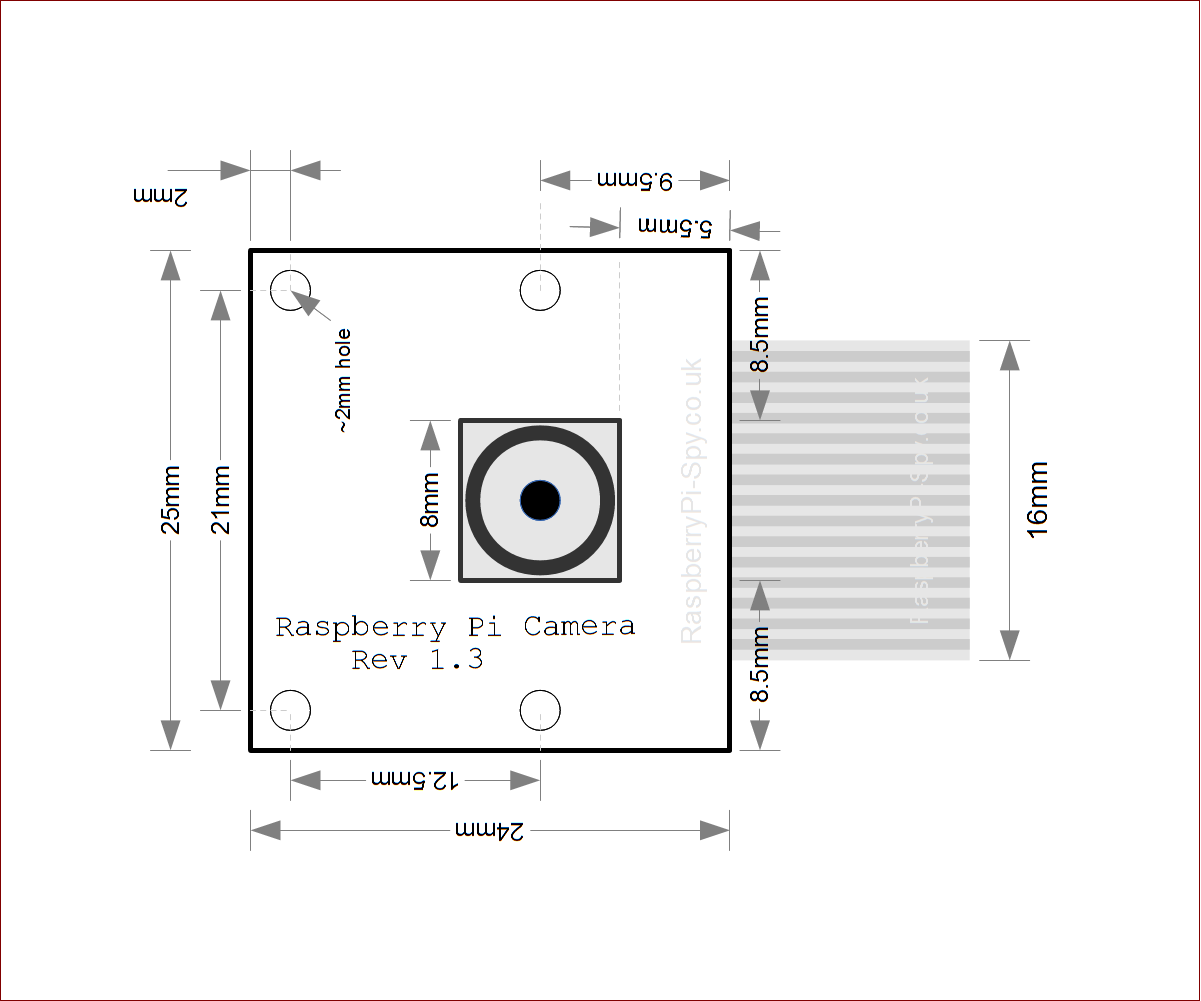
Raspberry Pi + camera
Modèle de la caméra : Raspberry Pi camera Rev. 1.3 (definition 2592 x 1944)
Modèle Rpi : Raspberry Pi 2 Model B v1.2 (Citron)
Pour avoir des infos complètes sur le modèle de Rpi cat /proc/cpuinfo, la ligne «Revision» donne la version qu'on peut retrouver dans cette liste (dans le cas présent : Revision a22042, 2 Model B (with BCM2837) )
Brancher et configurer la camera (source) :
- Brancher la caméra sur le rpi
- Configurer dans les préférences (redémarrer si nécessaire)
- Vérifier que la caméra est reconnue :
vcgencmd get_camera - Tester une capture d'image en ligne de commande
raspistill -o Desktop/image.jpg - Pour une prévisualisation :
raspistill -k(Ctrl+C pour stopper)
A ce stade, beaucoup de questions :
- Quelle définition adaptée à l'imprimante à sublimation (2560 x 1710 pour l'imprimante) ?
- Quels réglages peut-on faire sur l'image ?
- Comment configurer un point d'accès wifi pour récupérer les images ?
- Est ce possible de relier directement à l'imprimante à sublimation (= sans passer par carte SD) ?
- Quelle version de python3 ?
python3 –version→ python 3.5.3 - Quelle version de picamera ?
pip3 freeze→ picamera==1.13
Ajouter un bouton

Le bouton est relié à GND (broche 6) à droite, et pour le signal à GPIO17 (broche 11)
Réglages de la définition d'écran
À quelle définition s'affiche le rpi sur mon écran ? → fbset
probleme affichage camera : l'affichage de la preview coupe l'affichage du rpi (il est plus ou moins planté…)
- 1. augmenter la mémoire GPU ? (dans
/boot/config.txt) - 2. réduire la définition ? https://www.raspberrypi.com/documentation/computers/config_txt.html#hdmi_group
J'essaie la solution 2:
sudo nano /boot/config.txt
Et définir les 2 variables
hdmi_group=1 hdmi_mode=4 # 720p en théorie, en pratique fbset renvoie 1184x624 ?
Utilisation directe de l'imprimante à sublimation
Comment imprimer directement sur l'imprimante Canon Selphy CP730 ?
hostnamectl # renvoie la version du système
→ Raspbian GNU/Linux 9 (stretch)
sudo apt update # mise à jour sudo apt install cups # installation sudo apt install gcc libtool libssl-dev libc-dev libjpeg62-turbo-dev libpng-dev libtiff5-dev sudo apt install libcups2-dev sudo apt install printer-driver-gutenprint
télécharger gutenprint :
https://sourceforge.net/projects/gimp-print/files/gutenprint-5.3/5.3.3/gutenprint-5.3.3.tar.xz/download
extraire et se rendre dans le dossier, puis
./configure make clean make sudo make install
sudo usermod -a -G lpadmin pi # ajouter l'utilisateur pi au groupe lpadmin
sudo service cups restart # redémarrer cups
En cours
https://elinux.org/R-Pi_Troubleshooting
https://raspberry-lab.fr/Composants/Utilisation-Camera-sur-Raspberry-Pi-Francais/
https://raspberrytips.fr/camera-raspberry-pi-comme-webcam/
https://projects.raspberrypi.org/en/projects/push-button-stop-motion/2
https://stackoverflow.com/questions/25609844/pi-camera-preview-with-gui-raspberry-pi
https://pyimagesearch.com/2016/08/29/common-errors-using-the-raspberry-pi-camera-module/
Code
Comment faire quand la preview reste présente à l'écran alors que le programme est terminé ?
→ ouvrir un terminal avec CTRL+ALT+T et taper en aveugle pkill python3
En cours !
#coding: UTF-8 from picamera import PiCamera from time import sleep import datetime from gpiozero import Button button = Button(17) # camera = PiCamera() # https://picamera.readthedocs.io/en/release-1.13/fov.html?highlight=sensor%20mode#sensor-modes # camera = PiCamera(resolution=(2592, 1944), framerate=15,sensor_mode=2) camera = PiCamera() # camera.hflip = True # camera.vflip = True camera.rotation = 180 # camera.sensor_mode = 2 camera.resolution = (2592, 1944) camera.framerate = 15 # necessaire pour changer la resolution camera.preview_fullscreen=False camera.preview_window=(50, 120, 648, 486) camera.led = False # éteindre la LED de la caméra camera.start_preview() #camera.brightness = 50 # de 0 à 100 #camera.contrast = 0 # de -100 à 100 """ image_effect : none, negative, solarize, sketch, denoise, emboss, oilpaint, hatch, gpen, pastel, watercolor, film, blur, saturation, colorswap, washedout, posterise, colorpoint, colorbalance, cartoon, deinterlace1, deinterlace2 """ #camera.image_effect = 'none' """ exposure_mode : off, auto, night, nightpreview, backlight, spotlight sports, snow, beach, verylong, fixedfps, antishake, fireworks """ #camera.exposure_mode = 'auto' """ awb_mode (balance des blancs) : off, auto, sunlight, cloudy, shade, tungsten, fluorescent, incandescent, flash, horizon """ camera.awb_mode = 'fluorescent' camera.annotate_text = "awb_mode: fluorescent" while True: try: button.wait_for_press() # jpg ou png indiqué par l'extension camera.capture('/home/pi/Desktop/picam_' + str(datetime.datetime.now()) + '.png') except KeyboardInterrupt: camera.stop_preview() camera.close() break #~ for awb in camera.AWB_MODES: #~ camera.awb_mode = awb #~ camera.annotate_text = "awb_mode: %s" % awb #~ sleep(3) sleep(5)
\
Ressources
Tout sur les caméras Raspberry Pi : https://www.raspberrypi.com/documentation/accessories/camera.html
Démarrer avec la caméra : https://projects.raspberrypi.org/fr-FR/projects/getting-started-with-picamera/0
Documentation picamera : https://picamera.readthedocs.io/en/release-1.13/
Utiliser les GPIO avec la lib. RPi.GPIO : https://roboticsbackend.com/raspberry-pi-gpio-interrupts-tutorial/
Doc GPIO Zero : https://gpiozero.readthedocs.io/en/stable/
Quelques exemples GPIO Zero : https://www.framboiseetcompagnie.fr/1220-2/
Pour un rendu cohérent des images (luminosité, constraste, etc.), voir https://picamera.readthedocs.io/en/release-1.13/recipes1.html?highlight=capture#capturing-consistent-images
overlay avec imagemagick : https://raspi.tv/2014/overlaying-text-and-graphics-on-a-photo-and-tweeting-it-pt-5-twitter-app-series
overlay avec picamera : https://picamera.readthedocs.io/en/release-1.13/recipes1.html?highlight=overlay#overlaying-images-on-the-preview
application de stopmotion avec rpi+picamera : https://github.com/russb78/pi-mation
application photobooth : https://github.com/reuterbal/photobooth
Sur les tubes PVC :