Table des matières
Telerobot
(projet démarré le 18 mai 2021)
Humanisons la visioconférence grâce à un avatar élégant.
Avec un photon, des servomoteurs, des leds, du wifi. Juste quelques bases pour le moment…
Interface web : http://lesporteslogiques.net/telerobot/
Étape 1
Code photon tout moche (adapté depuis https://github.com/lesporteslogiques/atelier_ioc_2017/tree/master/mouvement_photon%2Bservo )
telerobot_001.phot (cliquer pour afficher le code)
- telerobot_001.phot
#define broche_bouton1 D4 #define broche_bouton2 D5 //servo1 sur D0 //servo2 sur D1 Servo servo1; Servo servo2; int position = 0; void setup() { servo1.attach(D0); servo1.write(90); // test servo2.attach(D1); servo2.write(90); // test pinMode(D7, OUTPUT); pinMode(broche_bouton1, INPUT); pinMode(broche_bouton2, INPUT); Particle.function("alarme", declencherAlarme); } int declencherAlarme(String commande) { if (commande == "m1gauche") { servo1.write(0); digitalWrite(D7, HIGH); delay(1000); servo1.write(90); digitalWrite(D7, LOW); } else if (commande == "m1droite") { servo1.write(180); digitalWrite(D7, HIGH); delay(1000); servo1.write(90); digitalWrite(D7, LOW); } else if (commande == "m2gauche") { servo2.write(0); digitalWrite(D7, HIGH); delay(1000); servo2.write(25); digitalWrite(D7, LOW); } else if (commande == "m2droite") { servo2.write(180); digitalWrite(D7, HIGH); delay(1000); servo2.write(90); digitalWrite(D7, LOW); } } void loop() { if (digitalRead(broche_bouton1) == HIGH) { servo1.write(25); digitalWrite(D7, HIGH); delay(100); servo1.write(90); digitalWrite(D7, LOW); delay(500); } if (digitalRead(broche_bouton2) == HIGH) { servo2.write(25); digitalWrite(D7, HIGH); delay(100); servo2.write(90); digitalWrite(D7, LOW); delay(1000); } }
Peut-être remplacer par ce servo : https://www.dfrobot.com/product-1970.html
Et puis ça ne marche pas, il reçoit une instruction par le web et plante avec D7 allumée fixe, peut-être que 2 moteurs c'est trop de courant pour la broche ViN, solution élégante : en enlever un, ou ajouter une alim externe
Étape 2
À peine mieux, avec un seul servo, ça plante et se bloque aussi, alors trop de courant demandé ou autre raison ? Problème de servomoteur ?
telerobot_002.phot (cliquer pour afficher le code)
- telerobot_002.phot
#include <neopixel.h> // This #include statement was automatically added by the Particle IDE. #define BROCHE_BOUTON1 D4 #define BROCHE_BOUTON2 D5 #define BROCHE_LED D2 #define BROCHE_SERVO D0 #define PIXEL_COUNT 4 #define PIXEL_TYPE WS2812B Adafruit_NeoPixel strip(PIXEL_COUNT, BROCHE_LED, PIXEL_TYPE); Servo servo1; Servo servo2; int position = 0; long compteur = 0; long last_show = 0; void setup() { //servo1.attach(BROCHE_SERVO); //servo1.write(90); // test pinMode(D7, OUTPUT); pinMode(BROCHE_BOUTON1, INPUT); pinMode(BROCHE_BOUTON2, INPUT); strip.begin(); strip.show(); //Particle.function("alarme", declencherAlarme); } void loop() { /* if (digitalRead(BROCHE_BOUTON1) == HIGH) { servo1.write(25); digitalWrite(D7, HIGH); delay(300); servo1.write(90); digitalWrite(D7, LOW); delay(300); }*/ /* if (digitalRead(BROCHE_BOUTON2) == HIGH) { servo2.write(25); digitalWrite(D7, HIGH); delay(100); servo2.write(90); digitalWrite(D7, LOW); delay(1000); } */ if (millis() - last_show > 1000) { strip.setPixelColor(0, strip.Color(random(255), random(255), random(255))); strip.setPixelColor(3, strip.Color(random(255), random(255), random(255))); strip.setBrightness(200); strip.show(); last_show = millis(); } } /* int declencherAlarme(String commande) { if (commande == "m1gauche") { servo1.write(40); digitalWrite(D7, HIGH); delay(600); servo1.write(90); delay(600); digitalWrite(D7, LOW); } else if (commande == "m1droite") { servo1.write(140); digitalWrite(D7, HIGH); delay(600); servo1.write(90); delay(600); digitalWrite(D7, LOW); } }*/
Petite amélioration quand même, il prend corps : avec des leds pour éclairer les yeux, et un système pour les faire bouger mais foutraque et en plus qui s'autodétruit assez vite.
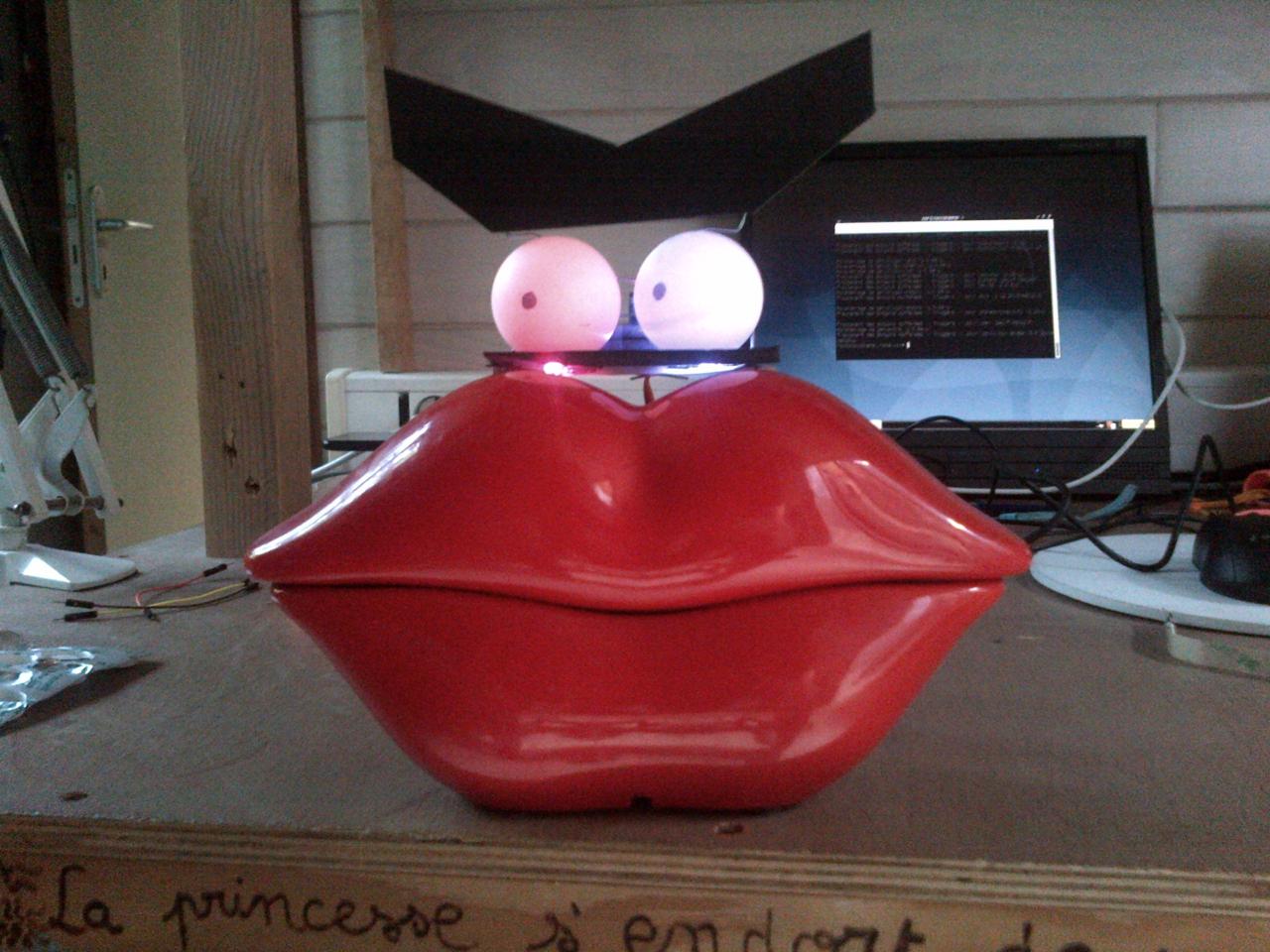
Mais c'est quand même beaucoup plus joli que https://www.youtube.com/watch?v=XEDgSblMb_4
Étape 3
La prochaine, pour l'instant une todolist
- résoudre le problème principal
- des sourcils mobiles le rendraient beaucoup plus expressif
- cette bouche ne peut pas rester immobile
Ressources
photon datasheet : https://docs.particle.io/datasheets/wi-fi/photon-datasheet/
Intro générale au circuit Photon : https://github.com/emoc/photon_introduction