Rédaction démarrée le 31 mai 2021
Cartographie en python
Quelques notes pour réaliser des cartes statiques en téléchargeant des «tuiles» d'OpenStreetMap sur lesquelles sont ajoutées des données saisies avec umap.
Avec pour but de les imprimer.
nb : soyez indulgent, je débute en python
Deux pistes
- Static Map : https://github.com/komoot/staticmap
- py-staticmaps : https://github.com/flopp/py-staticmaps
Tests
Static Map
Installation de Static Map
pip3 install staticmap pip3 show staticmap # permet de savoir quelle version est installée
Premier script
# test avec https://github.com/komoot/staticmap # Python 3.5.3 / pip 9.0.1 / staticmap 0.5.5 # Debian 9.5 @ kirin / 20210531 from staticmap import StaticMap, Line m = StaticMap(3000, 4000, 10) m.add_line(Line(((13.4, 52.5), (2.3, 48.9)), 'blue', 3)) image = m.render() image.save('map.png')
Et ça produit bien une carte en haute définition, c'est encourageant!
On peut choisir le fournisseur de «tuiles» à la création de la carte (ex. en noir et blanc)
m = StaticMap(3000, 4000, 10, url_template='http://a.tile.stamen.com/toner/{z}/{x}/{y}.png')
J'en ai trouvé une liste ici : https://wiki.openstreetmap.org/wiki/Tile_servers
py-staticmaps
Je tente l'installation avec
pip3 install py-staticmaps
Mais ça bloque sur une erreur, et quand j'essaie de la résoudre, c'est la réaction en chaîne de messages d'erreur que je ne comprends qu'à moitié (la moitié vide). Alors, on verra plus tard…
Réalisation
Étape 1 : le fond de carte
Un fond de carte de Quimper, en noir et blanc, en A4 paysage 300 dpi (avec une petite marge de 5 mm sur chaque bord)
- définition x : (29.7 - 1.0) / 2.54 * 300 = 3390 pixels
- définition y : (21 - 1.0) / 2.54 * 300 = 2362 pixels
Pour trouver le niveau de zoom et centrer la carte sur un point, on peut utiliser openstreetmap . Dans l'URL, on peut y lire les coordonnées lat/lon et le niveau de zoom, exemple : https://www.openstreetmap.org/#map=13/47.9968/-4.1043
- zoom : 13
- lat. : 47.9968
- lon. : -4.1043
Au sujet des niveaux de zoom : https://wiki.openstreetmap.org/wiki/Zoom_levels
Pour le fond de carte :
# test avec https://github.com/komoot/staticmap # Python 3.5.3 / pip 9.0.1 / staticmap 0.5.5 # Debian 9.5 @ kirin / 20210531 from staticmap import StaticMap, CircleMarker m = StaticMap(3390, 2362, url_template='http://a.tile.stamen.com/toner-lite/{z}/{x}/{y}.png') marker_outline = CircleMarker((-4.1043, 47.9968), 'white', 18) marker = CircleMarker((-4.1043, 47.9968), '#0036FF', 12) m.add_marker(marker_outline) m.add_marker(marker) image = m.render(zoom=16) image.save('fond_de_carte_quimper.png')
Le jeu de tuile est toner-lite de Stamen (voir http://maps.stamen.com/ )
Pour une raison qui m'échappe, le niveau de zoom n'est pas celui que j'avais trouvé avec OSM ? (nb : j'ai compris plus tard, la carte est adaptée aux éléments représentés, donc le niveau de zoom est pondéré par l'espace nécessaires aux différents éléments.)
Ce qui donne (extrait seulement, le fichier complet fait 4.8 MO)
maj juin 2024
Probablement que la manière de télécharger les tuiles a changé :
Étape 2 : les données
Une carte de test : https://umap.openstreetmap.fr/fr/map/quimper_test_data_620279 (edit) / Les données sont exportées en geojson depuis l'onglet «partager/exporter» de umap.
Les marqueurs sont numérotés, ils devront être reliés comme suit : (1,2), (2,3), (3,4), (4,5), (5,6), (6,7) mais par la suite ça devra fonctionner avec n'importe quelle paire de nombre.
Installation de geojson
pip3 install geojson
Lire les données avec geojson
Les données sont extraites du fichier geojson et placées dans un dictionnaire
# Lecture de données geojson # Python 3.5.3 / pip 9.0.1 / geojson 2.5.0 # Debian 9.5 @ kirin / 20210531 import geojson with open("./quimper.geojson") as f: data = geojson.load(f) points = {} # créer un dictionnaire contenant les points for feature in data['features']: nom = feature['properties']['name'] lon = feature['geometry']['coordinates'][0] lat = feature['geometry']['coordinates'][1] points[nom] = [lon, lat] # placer le point dans le dictionnaire for key, value in points.items(): print("nom :", key, "lon :", value[0], "lat :", value[1])
Chemins
Les chemins qui relient les points sont indiqués dans une liste de liste
chemins = [ [1, 2], [2, 3], [3, 4], [4, 5], [5, 6], [6, 7] ] for chemin in chemins: print("Tracer un chemin entre", chemin[0], " et ", chemin[1])
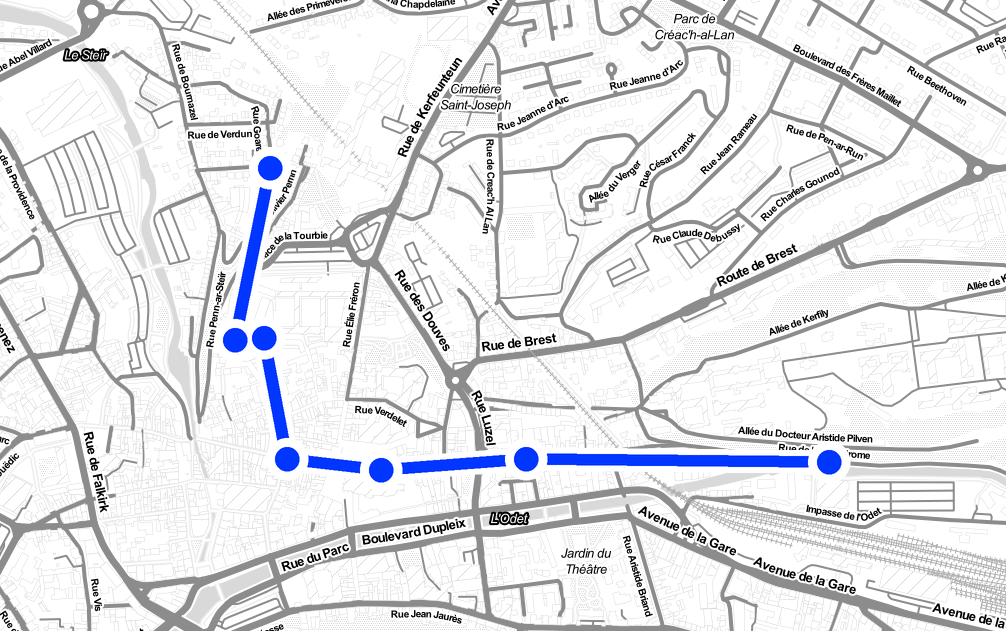
Étape 3 : tout rassembler
Procédure pour le script complet :
- créer le fond de carte
- définir les chemins dans une structure de données
- charger le fichier geojson
- tracer les contours des chemins et les contours des points
- tracer les couleurs pour les points et les chemins
Résultat : ça fonctionne (maintenant il restera à l'appliquer aux données réelles!), extrait :
Code complet
fond_de_carte_quimper.py (cliquer pour afficher le code)
- fond_de_carte_quimper.py
# Plan de circulation d'après des données geojson # Python 3.5.3 / pip 9.0.1 / geojson 2.5.0 / staticmap 0.5.5 # Debian 9.5 @ kirin / 20210531 import geojson from staticmap import StaticMap, CircleMarker, Line m = StaticMap(3390, 2362, url_template='http://a.tile.stamen.com/toner-lite/{z}/{x}/{y}.png') with open("./quimper.geojson") as f: data = geojson.load(f) points = {} # créer un dictionnaire contenant les points for feature in data['features']: nom = feature['properties']['name'] lon = feature['geometry']['coordinates'][0] lat = feature['geometry']['coordinates'][1] points[nom] = [lon, lat] # placer le point dans le dictionnaire # Les chemins relient les points chemins = [ [1, 2], [2, 3], [3, 4], [4, 5], [5, 6], [6, 7] ] # Tracer les contours de marqueurs et de chemins for key, value in points.items(): marker_outline = CircleMarker((value[0], value[1]), 'white', 42) m.add_marker(marker_outline) for chemin in chemins: if chemin[0] == int(key) or chemin[1] == int(key): point1 = str(chemin[0]) point2 = str(chemin[1]) coordinates = [points[point1], points[point2]] line_outline = Line(coordinates, 'white', 24) m.add_line(line_outline) # Tracer les chemins for key, value in points.items(): for chemin in chemins: if chemin[0] == int(key) or chemin[1] == int(key): point1 = str(chemin[0]) point2 = str(chemin[1]) coordinates = [points[point1], points[point2]] line = Line(coordinates, '#0036FF', 12) m.add_line(line) # Tracer les marqueurs for key, value in points.items(): marker = CircleMarker((value[0], value[1]), '#0036FF', 24) m.add_marker(marker) image = m.render(zoom=16) image.save('fond_de_carte_quimper.png')
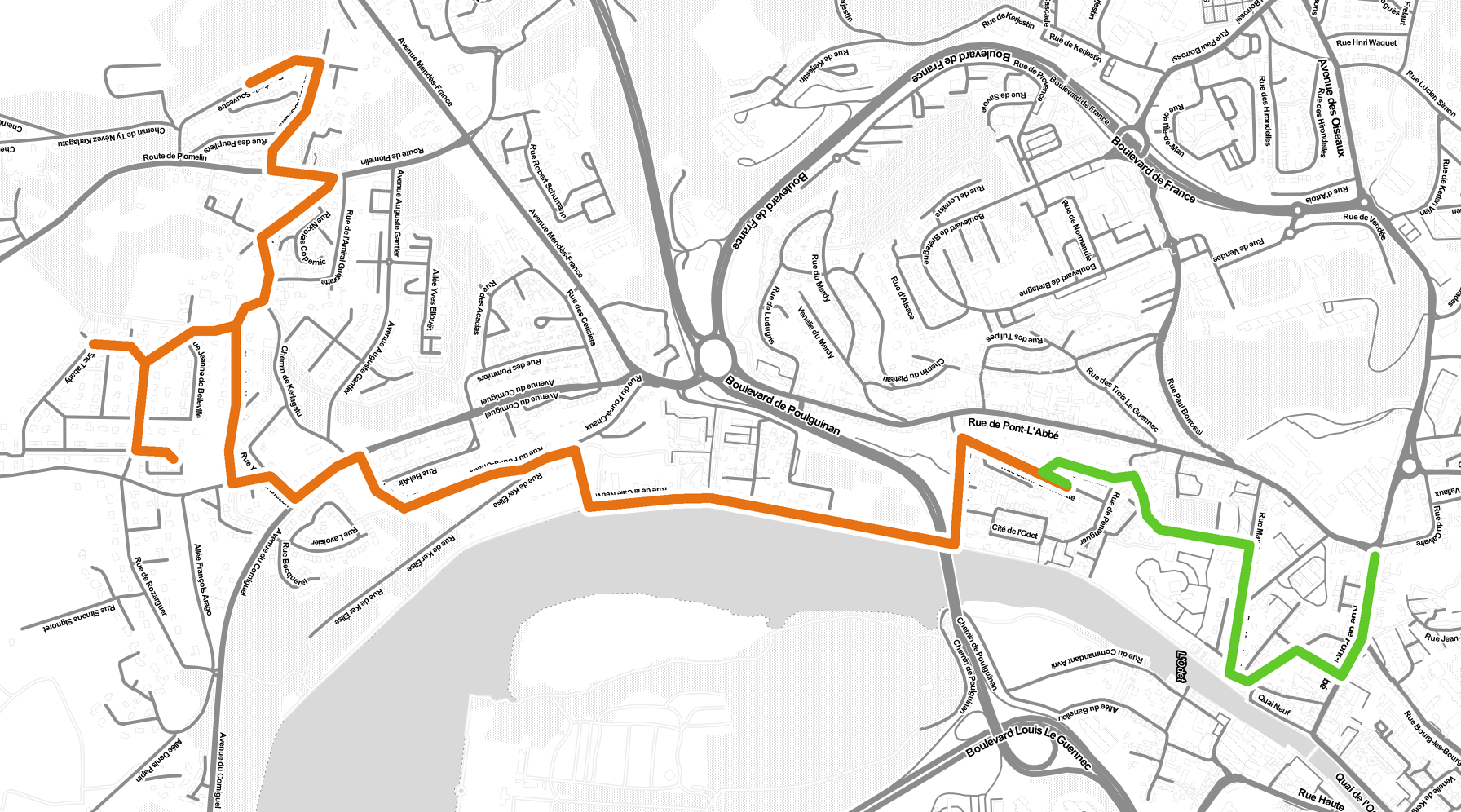
Une autre carte
Cette fois, ce sont des tracés de ligne dans umap qui sont utilisés pour définir une carte de trajets. Les couleurs utilisés dans umap définissent les différents segments des trajets.
J'ai essayé sans succès de réaliser avec Static Map une carte vide avec les noms de rues pour superposer aux trajets, mais ça ne fonctionne pas, le cadrage de la carte se faisant en fonction des éléments placés (et du niveau de zoom), les deux cartes ne se superposent pas.
À essayer : tracer cette seconde carte avec des tracés transparents.
Peut-être que de meilleurs résultats pourraient être obtenus avec py-staticmaps ?
fond_de_carte_quimper_pedibus.py (cliquer pour afficher le code)
- fond_de_carte_quimper_pedibus.py
# Plan de pédibus d'après des données geojson # Python 3.5.3 / pip 9.0.1 / geojson 2.5.0 / staticmap 0.5.5 # Debian 9.5 @ kirin / 20210601 import geojson from staticmap import StaticMap, CircleMarker, Line # définition choisie pour un A4 avec 5mm de marge sur chaque bord m = StaticMap(3390, 2362, 0, 0, url_template='http://a.tile.stamen.com/toner-lite/{z}/{x}/{y}.png') with open("./mobilite_douce_quimper.geojson") as f: data = geojson.load(f) pedibus_corniguel = [] # contiendra les segments du premier trajet pedibus_caphorn = [] # contiendra les segments du second trajet # Trier les trajets selon la couleur choisie dans umap for feature in data['features']: if feature['geometry']['type'] == "LineString": color = feature['properties']['_umap_options']['color'] coordinates = feature['geometry']['coordinates'] if color == "Red": pedibus_caphorn.append(coordinates) if color == "MediumVioletRed": pedibus_corniguel.append(coordinates) # Debug print("pedibus_corniguel", pedibus_corniguel, "\n") print("pedibus_caphorn", pedibus_caphorn, "\n") # Dans un premier temps, tracer les contours for trajet in pedibus_corniguel: ltraj = len(trajet) for x in range(0, ltraj-1): #print(trajet[x][0], trajet[x][1], "->", trajet[x+1][0], trajet[x+1][1]) point1 = [ trajet[x][0], trajet[x][1] ] point2 = [ trajet[x+1][0], trajet[x+1][1] ] coordinates = [point1, point2] line_outline = Line(coordinates, 'white', 24) m.add_line(line_outline) for trajet in pedibus_caphorn: ltraj = len(trajet) for x in range(0, ltraj-1): #print(trajet[x][0], trajet[x][1], "->", trajet[x+1][0], trajet[x+1][1]) point1 = [ trajet[x][0], trajet[x][1] ] point2 = [ trajet[x+1][0], trajet[x+1][1] ] coordinates = [point1, point2] line_outline = Line(coordinates, 'white', 24) m.add_line(line_outline) # Dans un second temps, trajet les chemins for trajet in pedibus_corniguel: ltraj = len(trajet) for x in range(0, ltraj-1): #print(trajet[x][0], trajet[x][1], "->", trajet[x+1][0], trajet[x+1][1]) point1 = [ trajet[x][0], trajet[x][1] ] point2 = [ trajet[x+1][0], trajet[x+1][1] ] coordinates = [point1, point2] line = Line(coordinates, '#e77214', 12) m.add_line(line) for trajet in pedibus_caphorn: ltraj = len(trajet) for x in range(0, ltraj-1): #print(trajet[x][0], trajet[x][1], "->", trajet[x+1][0], trajet[x+1][1]) point1 = [ trajet[x][0], trajet[x][1] ] point2 = [ trajet[x+1][0], trajet[x+1][1] ] coordinates = [point1, point2] line_outline = Line(coordinates, '#62c92b', 12) m.add_line(line_outline) image = m.render(zoom=16) image.save('fond_de_carte_quimper_pedibus.png') # Et une autre couche avec uniquement les noms de rues à superposer # malheureusement ça ne marche pas, la carte est cadrée différemment... """ carte_rues = StaticMap(3390, 2362, 0, 0, url_template='http://a.tile.stamen.com/toner-labels/{z}/{x}/{y}.png') marker = CircleMarker((-4.118553, 47.985771), '#0036FF', 1) carte_rues.add_marker(marker) # nécessaire, on ne peut pas faire le rendu d'une carte vide image_rues = carte_rues.render(zoom=16) image_rues.save('fond_de_carte_quimper_pedibus_labels.png') """ # Une alternative pourrait être de recréer la page avec les trajets # en les mettant en couleur transparente # nb : depuis j'ai testé, ça se superpose à merveille quand on utilise des couleurs transparentes! (en rgba : #00000000)
Ressources
Des alternatives / services alternatifs : https://wiki.openstreetmap.org/wiki/Static_map_images
Différents fournisseurs de tuiles (fonds de carte) : https://wiki.openstreetmap.org/wiki/Tile_servers
Les dictionnaires en python : https://www.mfitzp.com/tutorials/python-dictionaries/